





Walking on two legs isn’t as easy as it seems. For robots and their designers, it is an even bigger challenge! Researchers at EPFL’s Biorobotics Laboratory are testing novel algorithms to improve humanoids’ ability to walk and interact with humans.
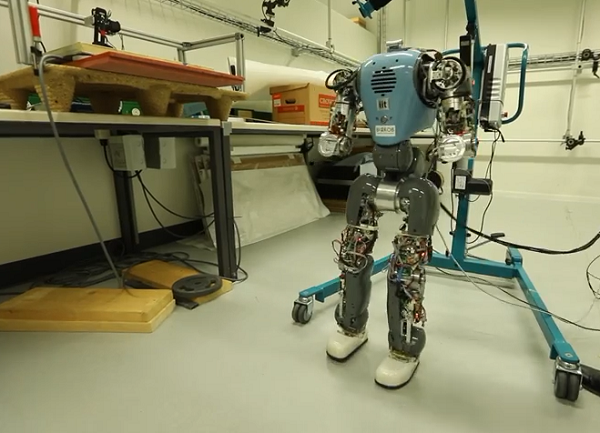
For humans, it comes perfectly naturally. But walking on two legs is actually a complicated task, requiring several muscles to perform delicate balancing acts. That’s why, in spite of years of major technological advancements in the field, humanoid robots are still far from being able to get around easily and reliably. Engineers at EPFL’s Biorobotics Laboratory are testing new walking algoritms on a plateform called COMAN, short for COmpliant HuMANoid. This 95-cm-tall humanoid is designed specifically for studying walking – which is why it has no head.
COMAN was developed under the EU AMARSi project and is being used by several research teams. The EPFL team is looking specifically at the “brains” of the machine. “We developed algorithms that can improve the robot’s balance while it’s walking,” says Hamed Razavi, a researcher scientist at the Biorobotics Lab.
In harmony with symmetries
One of COMAN’s distinguishing features is its joints, which are integrated with elastic elements that give it greater flexibility when performing different tasks. The EPFL team came up with a novel control algorithm for the robot, based on the existing symmetries in the structure and dynamics of the robot’ as well as the mathematical equations representing the robot dynamics. “You could say we’re working in harmony with these symmetries rather than against them. As a result, we obtain a more natural and robust walking gait,” says Razavi.
The control algorithm uses sophisticated computer programs to carefully analyze the date received from the robot – including its position, velocity, joint angles, etc. – and sends appropriate commands to the motors, telling them what to do in order to maintain the robot’s balance. “For example, if someone pushes COMAN, for example, our algorithms will calculate exactly where its foot should land in order to counteract the perturbation,” says Razavi.
Climbing stairs and opening doors
The algorithms are geared towards three types of realworld applications. The first is carrying out rescue missions in disastrous scenarios. “In environments designed by humans – like a nuclear power plant where there are stairs to climb and doors to open – humanoid robots can get around more easily than robots with wheels,” says Razavi. The second is helping with tasks like carrying heavy boxes or moving objects (see box). And the third is creating exoskeletons for the disabled.
“Making the robots more stable is just the tip of the iceberg,” says Razavi. The next step is refining the algorithms so that the humanoids have a wider range of movement and can overcome obstacles and walk on irregular or sloped surfaces.












