At CDNLive Israel, Yaron Netanel of Mellanox talked about his experience with Palladium ICA mode. ICA stands for in-circuit acceleration.
One basic way of using Palladium is in-circuit emulation or ICE. In this method, the DUT is modeled on the Palladium emulator, and it is connected to real hardware via one or more SpeedBridge interfaces. There are several pluses to this approach, in particular that the real hardware behaves accurately without a huge investment in modeling. However, it isn’t ideal for remote access where systems may need to be rebooted. However, It is a way of working that will never go away, since eventually you will always want to run the DUT in the most accurate environment that you can.
Then there was simulation acceleration mode, where the DUT runs on the Palladium emulator, as always, and the testbench runs on the host. Note that the software here is the testbench, not the software load that will eventually run on the DUT silicon.
Both of these approaches suffer from some restrictions. Yaron jokingly pointed out that you always have everything you need, right? For the ICE approach, of course:
Or for the simulation acceleration approach:
Or, just maybe, some of that is not true!
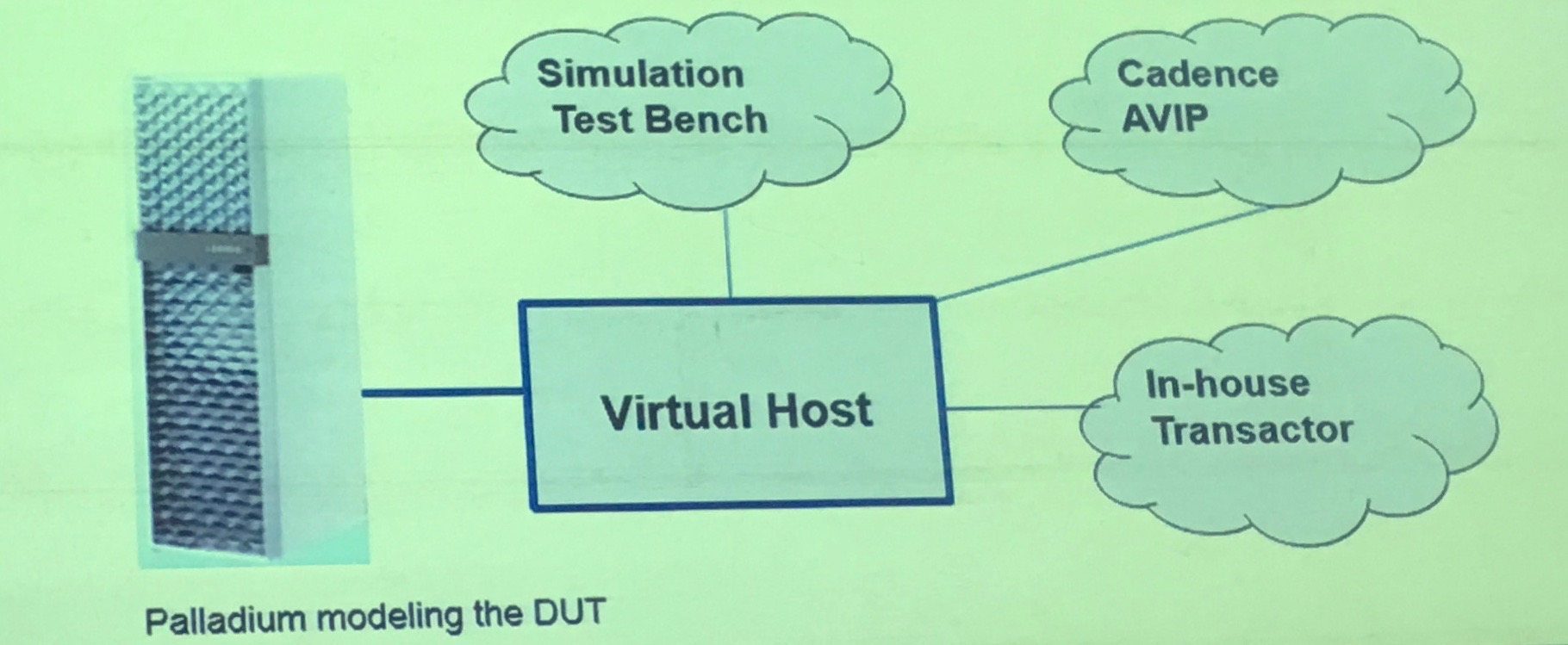
This is where the hybrid approach called in-circuit acceleration or ICA comes in. It combines both approaches at the same time with both hardware and software targets.
This flexibility gives several advantages, in that it is not a requirement to model everything in both places. If you’re using a hardware model, you don’t have to re-model it in RTL in order to analyze a bug. But, if you find a bug during in-circuit emulation that needs further analysis, you don’t have to reproduce it in acceleration. Further, you can access all the features of RTL simulation for advanced debugging with close to the speed of in-circuit emulation.
The table below summarizes the differences between the three different methodologies.
| Classic ICE | Simulation Acceleration | In-Circuit Acceleration | |
| Model Generation | HDLICE | IXCOM | IXCOM |
| Supported Targets | SpeedBridge | Virtual | SpeedBridge and virtual |
| DUT Frequency | Hardware | Possibly reduced by HW/SW interaction | “It depends” |
One challenge is synchronizing across the whole emulation environment. Running virtual software targets requires the clock to stop for hardware/software synchronization. There are two problems with this. One is just the reduced emulation speed. But the more serious one is that some targets, such as PCI Express (PCIe), do not work if the clock stops. If you use Palladium’s “dynamic targets mode”, then the target can run without clock stop but it also kills the simulation and virtual targets won’t work. The solution is to use GFIFO and SFIFO to reduce the impact on software target’s performance.
In summary, ICA gives you the best of both worlds:
– See more at: https://community.cadence.com/cadence_blogs_8/b/breakfast-bytes/archive/2016/09/23/mellanox-debugging-complex-flows-using-indago#sthash.UMllkJiD.dpuf
DigiKey, a leading global commerce distributor offering the largest selection of technical components and automation…
Infineon Technologies AG (FSE: IFX / OTCQX: IFNNY) today announced the launch of a new…
1700 V GaN InnoMux-2 IC delivers efficiency of better than 90 percent from a 1000…
NVIDIA today announced that xAI’s Colossus supercomputer cluster comprising 100,000 NVIDIA Hopper Tensor Core GPUs…
Acquisition of Altair Engineering Inc., a global leader in computational science and artificial intelligence software,…
Combined offering makes it faster and easier to collect equipment telemetry data at the edge,…
{kind=link}
{kind=link}
{kind=link}