
Battery-powered mobile applications can now operate for longer per charge using an efficient new encoder technology
Until recently, autonomous robots and aerial drones have been more or less the sole preserve of large corporations and government agencies such as the military. Now, however, the technologies are becoming more affordable and a wide variety of low-cost commercial applications are hitting the market. Potential uses for civilian drones include surveying crops, inspecting power cables, monitoring the environment or studying wildlife. Forecasters suggest these markets could grow to several billion dollars within the next 10 years.
On the ground, affordable, agile, mobile robots are attractive for a variety of duties such as warehouse automation and autonomous agricultural applications. Moreover, small robotic devices are already providing help with domestic tasks such as vacuuming and lawn-mowing. In the future, smarter robots with more sophisticated movement and positioning capabilities could provide further assistance in the home or in an office environment, including additional cleaning tasks, security, productivity, or delivery of goods.
So, after years of science-fiction fantasy, today’s robotics applications really are going mobile. With mobility comes the need for battery-powered operation, and as markets develop and end users become more demanding, every milliampere-hour of battery energy will become increasingly precious. Careful management of a limited power budget is essential to enable the robot to do more work and operate for longer on each full charge. Moreover, as greater efficiency minimizes energy waste, engineers can exploit the opportunity to specify smaller and lighter batteries, thus realizing further improvements in operation and reducing application size.
The mobile and aerial platforms now emerging incorporate large numbers of electric motors, not only for driving wheels or rotors, but also in various positioning mechanisms and actuators that often require motion control in multiple axes. Motor power consumption may range from several watts in a small positioning mechanism to tens of watts or sometimes considerably more for traction or lift. Each motor has an associated driver/controller unit that also dissipates significant power. Minimizing the power consumed by each motor system liberates more battery energy for useful work, and the cumulative effect across multiple motors can deliver a valuable advantage in the quest to build robots that can go further on smaller batteries.
The choice of encoder, used to capture the position information the controller needs to execute the motor’s vector-control algorithm, can have an important influence on the system’s energy efficiency. In multi-motor systems, the energy savings achievable by selecting an efficient encoder can have an appreciable effect on the power budget. Among the encoder technologies available today, capacitive encoders can not only boost efficiency but also enable greater reliability, reduce maintenance, lower development costs and accelerate time to market.
Improving Motor Controls
Today, the most commonly used encoder types are optical encoders and magnetic encoders. An optical encoder comprises an LED-source and optical-sensor combination that detects light transmitted through or reflected from a code wheel mounted on the motor shaft, as illustrated in figure 1. Two LEDs positioned in quadrature enable detection of both motor speed and direction. A third LED may be used to monitor a single marking on the code wheel, to provide an indexing pulse to the motor-control system.
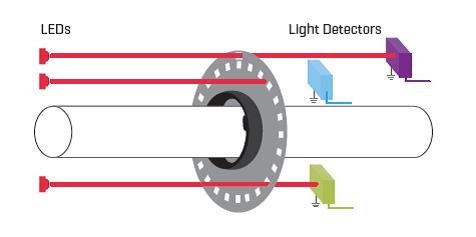
Figure 1. Optical encoder comprising LED sources, receiver and code wheel.
The encoder resolution, in terms of pulses per revolution (ppr) is dependent on the number of precision-spaced markings on the code wheel. Optical encoders can have very high resolution, but also suffer from several weaknesses. These include vulnerability to dust, grease or condensation, which can collect on the code wheel and cause missed or false readings. In addition, LED brightness will lessen over time and ultimately burn out, leading to failure that can only be remedied by replacing the encoder.
As far as energy efficiency is concerned, it is true that optical encoders draw relatively high current, which increases at higher resolution settings and with more complex output-signal formats. In fact, the current consumption can more than double from lowest to highest resolution. Some encoders can draw as much as 85mA at the highest resolution. This may not sound important next to the power consumed by the motor, but at 5V and 85mA the encoder is consuming 0.425 watts. In a four-motor system the encoders alone are responsible for 1.7 watts. Reducing this drain on the battery’s energy could allow the application to run other systems such as an on-board camera, sensors or small actuators for a considerable length of time.
Magnetic encoders provide an alternative that does not require line of sight and therefore are not vulnerable to errors due to contamination. In addition, magnetic encoders are able to operate even when immersed in non-conductive fluids such as gear oil. On the other hand, the positional resolution and accuracy is typically lower in comparison with optical encoders. Depending on the type of magnetic encoder, the maximum current can range from about 20mA to 160mA or more.
As a more competitive alternate to optical or magnetic technology, new capacitive rotary position encoders deliver valuable savings in power consumption for motor-rich applications such as mobile robotics. This type of encoder can also be aligned more easily and accurately when the motor is initially set up, which can yield further energy savings and may allow use of smaller, lighter, lower-power motors.
Capacitive Encoder Principles
Capacitive encoders use the same principle as the digital Vernier caliper, which is known to be reliable, cost effective, accurate and precise. CUI’s AMT capacitive encoders comprise a fixed body and one moving element, as shown in figure 2. Each of these elements has two patterns of bars or lines that together form a variable capacitor configured as a transmitter/receiver pairing. As the encoder rotates, the movement of the element attached to the motor shaft modulates the output to produce a unique but predictable signal. The encoder contains an ASIC that interprets this signal and uses it to calculate the position of the shaft and direction of rotation to create the standard quadrature outputs. With the help of an onboard processor the ASIC and a microprocessor can work together to generate more complex outputs such as the commutation pulses necessary for brushless dc (BLDC) motors or serial outputs in absolute encoders.
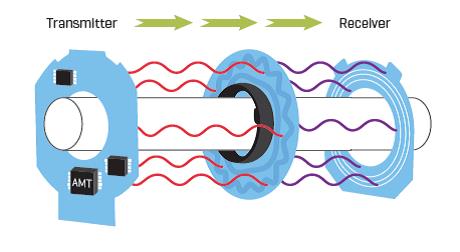
Figure 2. Capacitive encoder using the same principle as the digital Vernier caliper.
+The capacitive operating principle allows the encoder to maintain accuracy in dusty or dirty environments, such as in a warehouse, on a factory floor, or in equipment deployed outdoors. Similarly to magnetic technology, capacitive encoders can also be submerged in non-conducting fluids such as gear oils. This can save expensive sealing of the code wheel enclosure and minimize demand for routine cleaning or replacement of the disk, which is often needed when using optical encoders. At the same time, the capacitive encoder provides equivalent or superior accuracy compared to other encoder technologies, with a typical accuracy value of 0.2 degrees.
Another advantage of the capacitive encoder is that resolution can be adjusted dynamically, whereas optical encoders are fixed such that changing the resolution requires fitting a different encoder. Adjustable resolution delivers advantages in development, by allowing engineers to make any changes to prototypes quickly and easily, and also aids production supply-chain management by allowing a single stock-keeping unit (SKU) to be used in multiple motor controls of different resolutions. The encoder housing is designed for easy assembly and supports multiple mounting options. In addition, multiple sleeve sizes are provided to suit commonly used motor shaft diameters.
Energy Savings and Efficiency Gains
The AMT encoders have very low current requirements, with some series drawing less than 10mA of current at the highest resolution. This corresponds to 0.2W in a four-motor system operating at 5V.
Recall that optical and magnetic encoders can draw considerably higher current, thereby significantly increasing overall power consumption in a multi-motor system. Table 1 shows the power consumed purely by the encoders of a four-motor system such as a drone or mobile robot, comparing the performance of CUI AMT capacitive encoders with optical and magnetic alternatives.
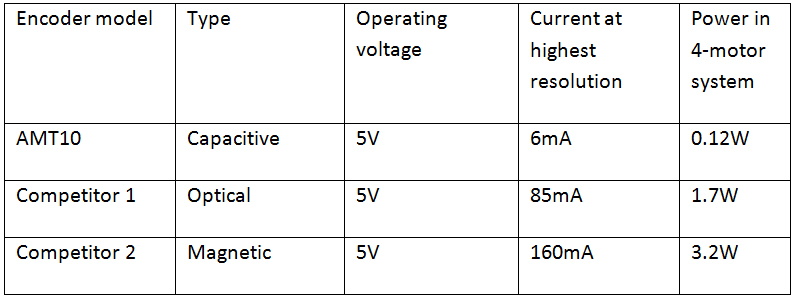
Table 1. Encoder power consumption comparison
Capacitive encoders are shown to offer a superior energy-efficient solution, and can give designers more freedom to manage the limited power budget in mobile and battery-operated applications. Moreover, the capacitive encoder’s operating current is independent of the resolution setting, which allows the encoder settings to be optimized without compromising application power consumption.
When paired to a brushless dc motor, capacitive encoders also allow faster and easier digital “zeroing” to align the encoder U, V and W signals with the rotor windings. To align an optical encoder, the rotor is usually locked in a known position and the code wheel is physically aligned. The motor is then back-driven while using an oscilloscope to verify correct alignment of the back-EMF and encoder zero-crossing points. This is an iterative process that can take 15 to 20 minutes, although small errors may remain. These errors prevent the motor running at maximum efficiency, thereby wasting precious battery energy. It is even possible that the inability to optimize alignment may force the engineer to over-specify the motor to ensure the desired torque.
In contrast, digital zeroing by programming the encoder using a software application ensures perfect alignment every time. The process takes seconds to complete and eliminates unit-to-unit variability. The motor is energized to lock the rotor in the desired position, and the encoder is set to zero at this position using a single command. No additional instruments are required. By allowing accurate, repeatable alignment, this technique ensures that the motor is able to run smoothly at optimum efficiency thereby delivering best performance and maximizing battery life in mobile applications.
Benefits Beyond Battery-Operated Applications
Market demands for better performance may provide enough encouragement for designers of battery-operated appliances to take advantage of capacitive encoders to boost the efficiency of next-generation drive systems. On the other hand, the emergence of new regulations governing efficiency of electric motors show that regulators are taking a progressively tougher attitude toward the efficiency of electric-motor systems. These include the EU’s latest IEC 60034-30-1 standard, which has introduced a new Super Premium Efficiency level for three-phase induction motors. In the US, the Department of Energy (DoE) will bring new legislation into force in mid 2016 that both increases minimum efficiency standards and includes types of motors not previously covered.
The DoE’s analysis estimates that more than 70% of the total potential energy savings achievable through the new legislation can be realized through system-level savings such as improving component efficiency and using smaller motors where possible. Capacitive encoders can help towards using smaller motors, and allow designers to reduce the power draw of their entire systematic government agencies continue to focus more sharply on this area.
Conclusion
Affordable automation in the form of small mobile robots and civil drones could revolutionize activities such as manufacturing, distribution and asset management.
Low-power, precision capacitive encoders can deliver valuable savings in overall energy consumption for these motor-rich mobile applications, while also streamlining development and manufacturing as well as reducing maintenance overheads so helping to reduce ownership costs. As emerging government regulations indicate an increasingly strict attitude to the energy efficiency of motor systems, designers could find even more incentives to adopt this technology.





